


Robô industrial de seis eixos de alta velocidade para corte de placa de metal
TSR070-07-A Usando estrutura simétrica de braços, não é fácil produzir vibração. O quarto, quinto e sexto eixo adotam re
Descrição
Informação básica
| Modelo Nº. | TSR070-07-A |
| Usar | 3c Linha de Produção |
| Função | Soldagem |
| carga útil | 6kg |
| Pacote de transporte | Embalagem de madeira |
| Especificação | TSR070-07-A |
| Marca comercial | Topstar |
| Origem | China continental |
| Código SH | 8428904000 |
| Capacidade de produção | 1000 |
Descrição do produto
TSR070-07-AUsando estrutura simétrica de braços, não é fácil produzir vibração. O quarto, quinto e sexto eixo adotam um redutor oco ultrafino, pequeno e requintado, tornando-o capaz de trabalhar em um espaço pequeno.
Recurso
Alta velocidade
Alta precisão
Alta estabilidade
Escalabilidade forte
Tecnologia de controle de movimento de software
Combinação de controle e visual
Sistema de controle de barramento EtherCAT
Instalação simples
Especificação
| Modelo de Robô | TSR071-06-A/TSR070-07 |
| Forma de Braço | Múltiplas Juntas Verticais |
| Liberdade de movimento | 6 eixos |
| carga útil | 6kg |
| Repetir Precisão de Posicionamento | ±0,02 mm |
| Curso Máximo | 710mm |
| Peso corporal | 45kg |
| Método de instalação | Qualquer ângulo |
| Nível IP | IP65 |
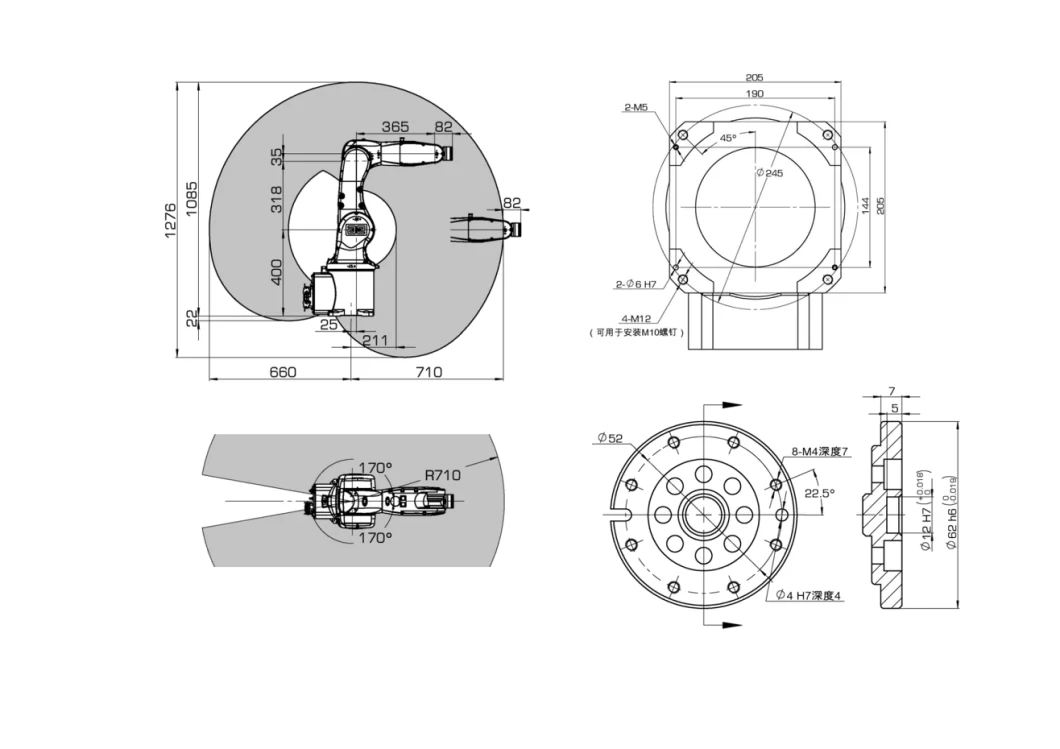
Espaço de trabalho

Armário de controle1. A técnica de controle de barramento EnterCAT usa o barramento EnterCAT como a linha de comunicação para todo o sistema, com alta estabilidade, alta velocidade de transmissão, fácil fiação, fácil expansão2. Kernel em tempo real do WINDOWS+tecnologia de controle de kernel+software em tempo real para garantir a operação e a compatibilidade suaves, economize 40% nos custos3. Poderosa capacidade de simulação Simulação online em tempo real e função de simulação de programação off-line, para fornecer proteção para operações de campo, melhorar a eficiência de programação em 50%, reduzir a taxa de falha do processo de operação. (Sistema de controle de robô doméstico exclusivo)4. kernel de controle de movimento de softwarePesquisa e desenvolvimento totalmente independentes de algoritmos de controle de movimento de robôs, para dominar a tecnologia central, para garantir a competitividade contínua do mercado sem custos significativos.



Anterior: Robô de vedação de dois componentes direto da fábrica para vidro isolante com linha dupla
Próximo: Analisador de pele dermatoscópio médico portátil portátil
Nosso contato
Envie agora




